


EZGripper™ Robotic Grippers
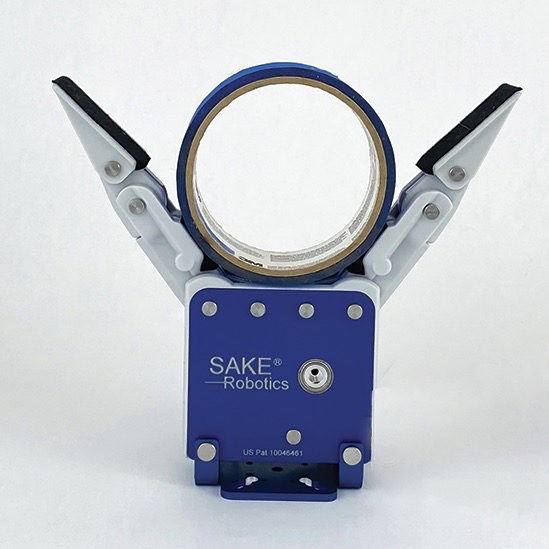
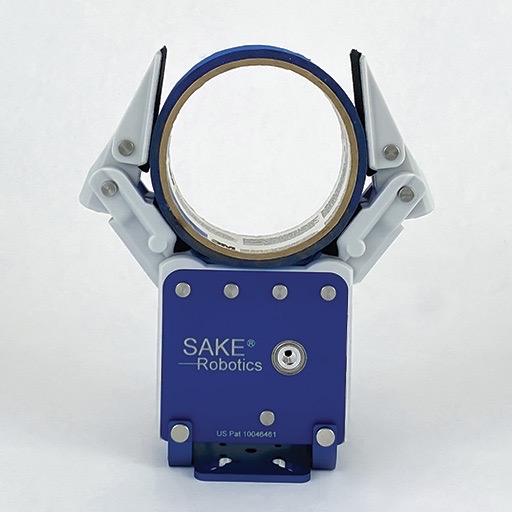
The EZGripper™ robotic grippers provide under-actuated parallel gripping for reliably picking up and holding a variety of objects weighing between grams and multiple kilograms. The under-actuated fingers stay straight when picking up small objects like pencils and automatically wrap large objects. Full position and torque control enable picking up objects with very gentle force or a very firm grip.
EZGripper™ Product Features
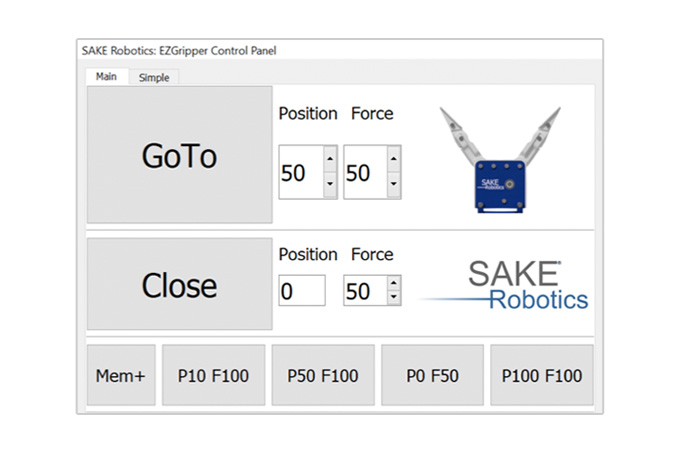
Easy-to-use Software
The EZGripper App makes controlling the grippers very intuitive and efficient. The EZGrippers have programmable position (0-100) and force (0-100).
You can also control the grippers through Python on Windows 10, Linux and ROS.
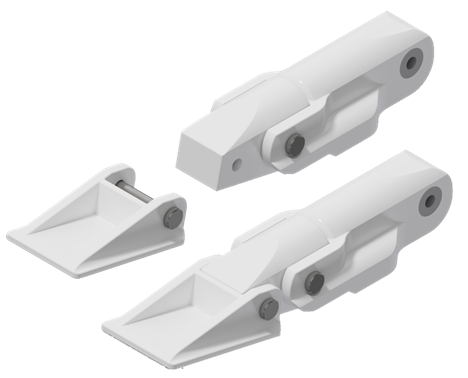
EZGripper Fingers
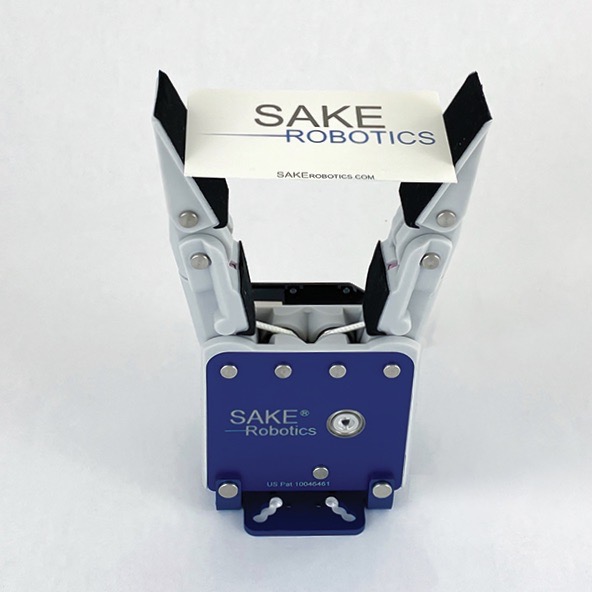
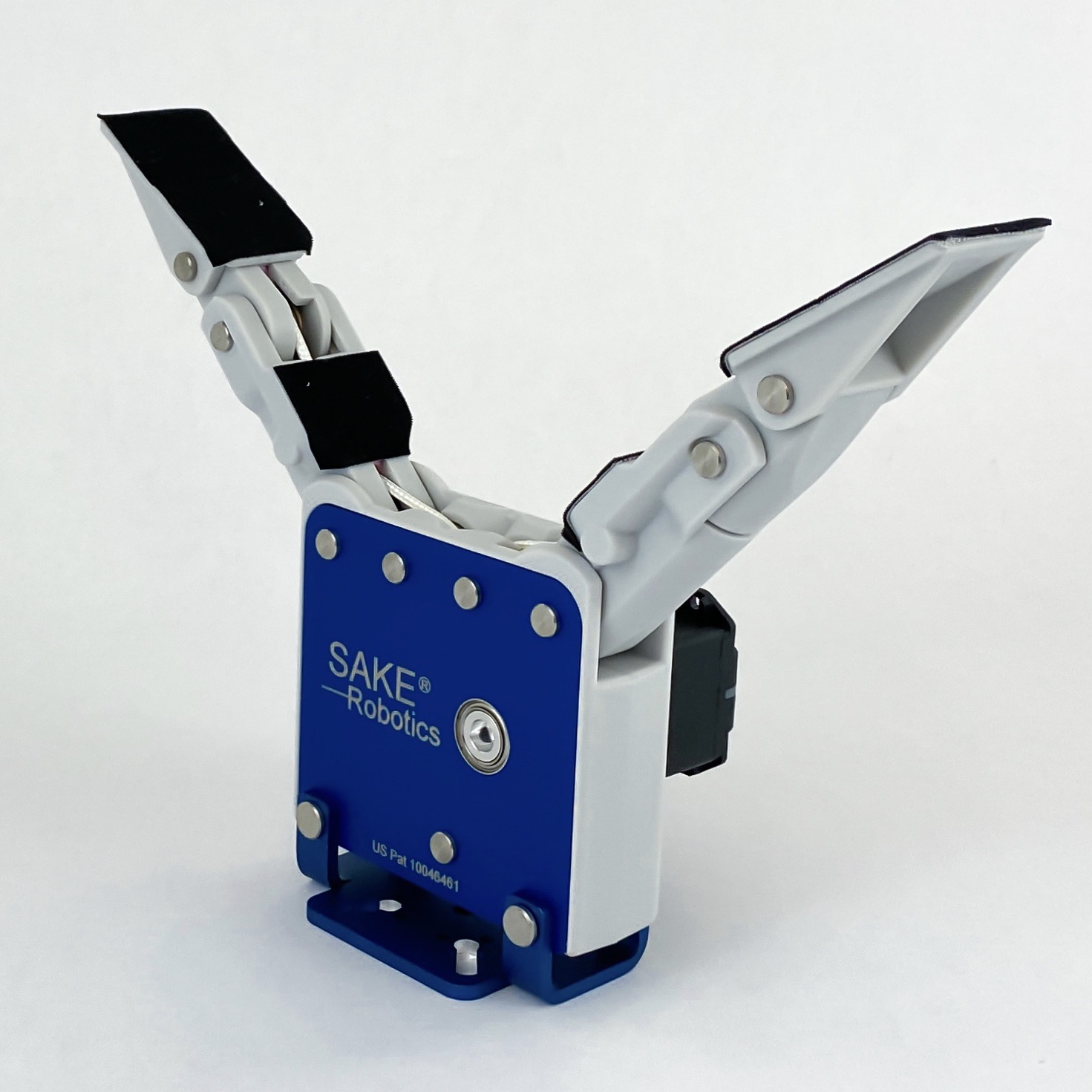
The EZGripper fingers have a sleak pointed design to enable slipping between objects when picking.
The fingers can have attachments on both the front and back sides of the finger. It is easy to develop specific finger pads for all kinds of applications.
The EZGrippers come with 30mm by 50mm finger pads.
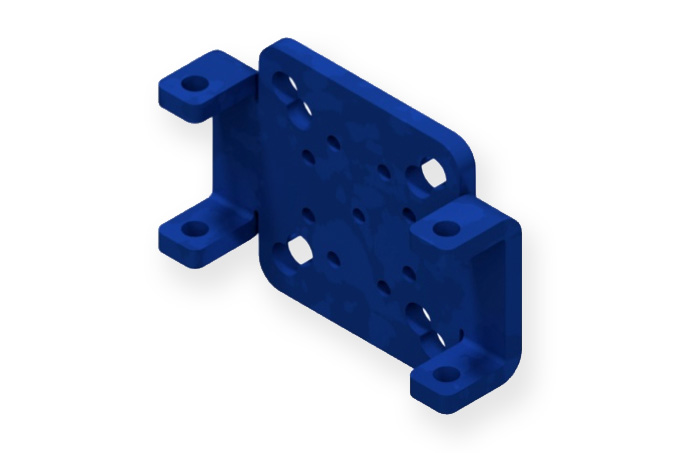
“Universal” Robot Mount
This strong yet lightweight aluminum mount is easily bolted to a wide variety of robotic arms. The mount is designed for the EZGripper to be center aligned to the robot wrist for most robots. This allows 360 degree rotation about the wrist with the grasp center aligned to the axis of rotation.
Other mounts are available that hold 2 and 3 grippers.
Cables And Power Supply Are Included With The EZGrippers™ Robotic Grippers
Simply plug the USB interface (to RS485) into your cobot controller or computer and you are up and running quickly!
EZGripper™ Product Specifications
Grasp Width | 145mm |
Payload | 5kg (wrapping grasp on 9cm pipe) 2.5kg (pinch grasp on 9cm pipe) |
Gripper Weight | 365g + 35g (mount) |
Grasp Force | ON - 35N |
Servo | Robotis Dynamixel MX-64AR |
Operating Voltage | 12V |
Software |
|
Robots |
|