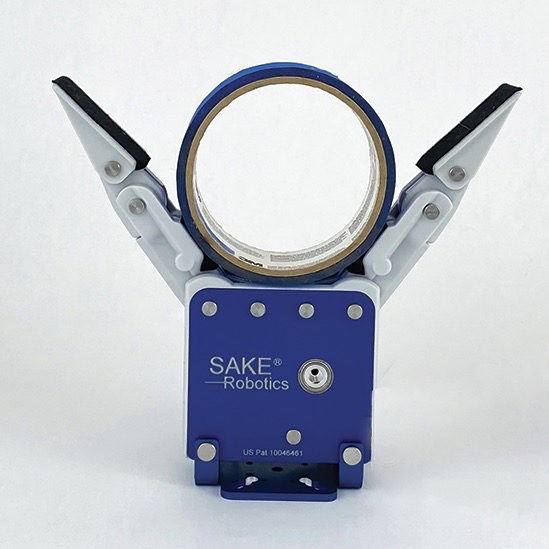
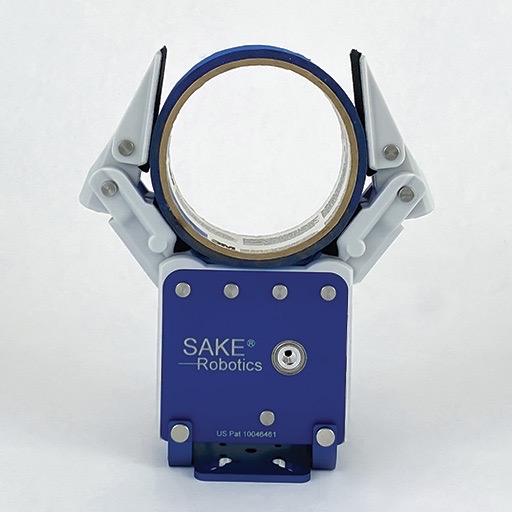


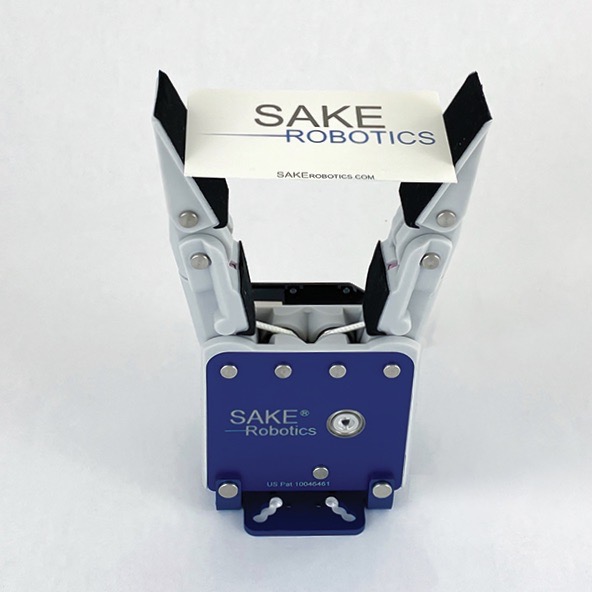
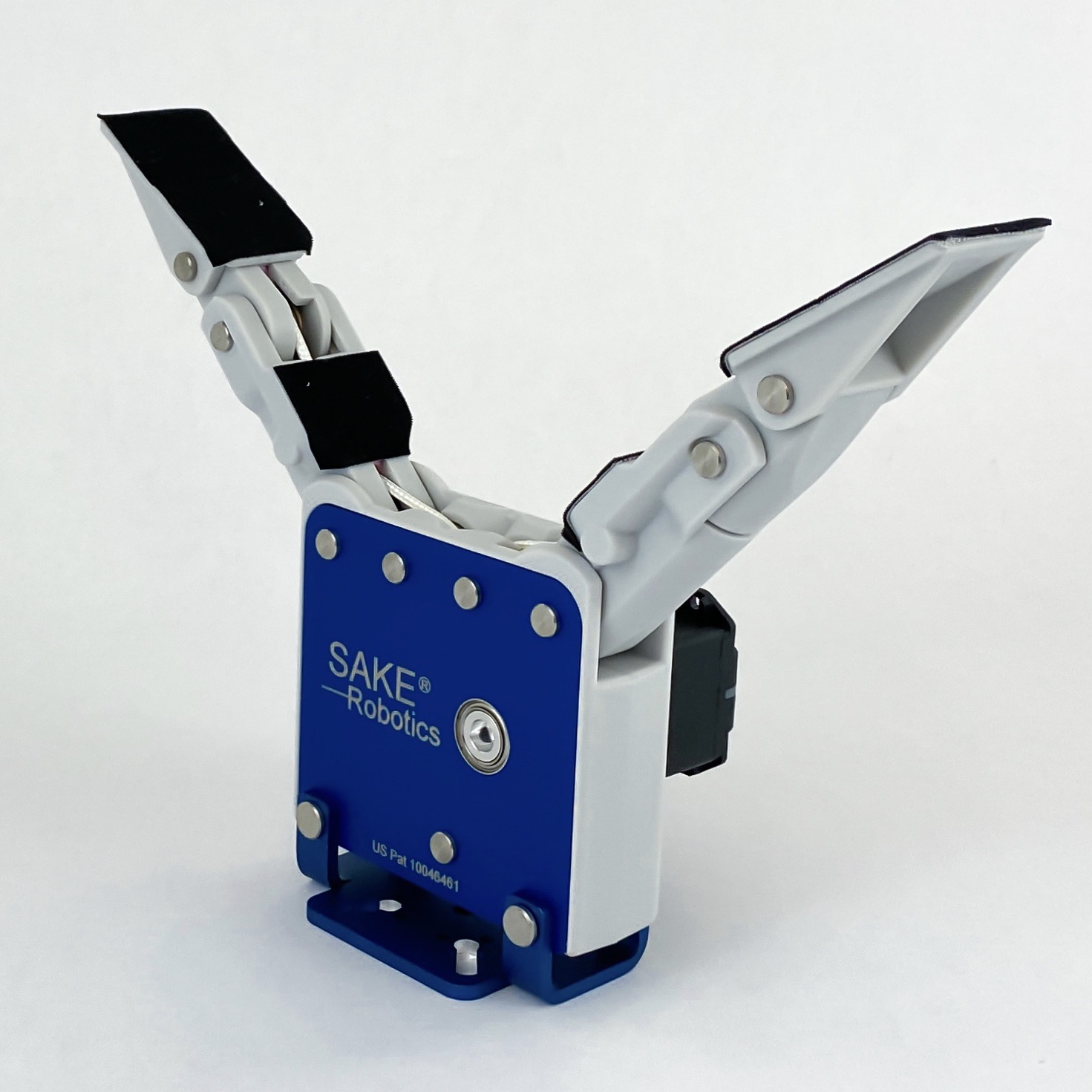
Announcing EZGripper™ package for Unitree G1
Human-safe, durable, lightweight robotic grippers tightly integrated into the Unitree G1 Humanoid
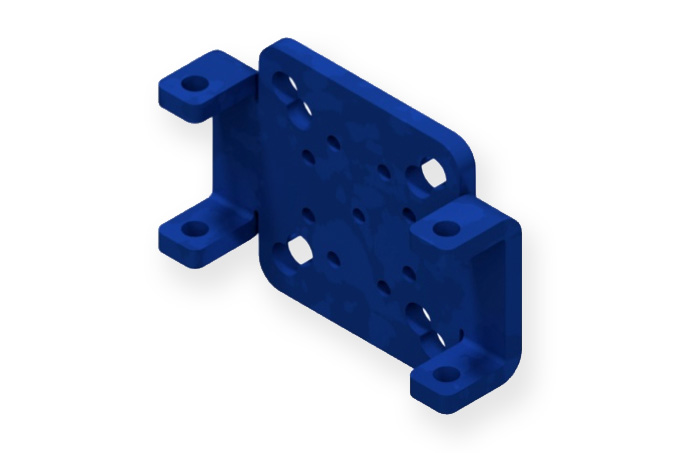
Native mount specific for unitree G1
Native xr_teleop integration
Integrated cabling and power
Now you can have easy to use, super durable grippers for your G1 humanoid